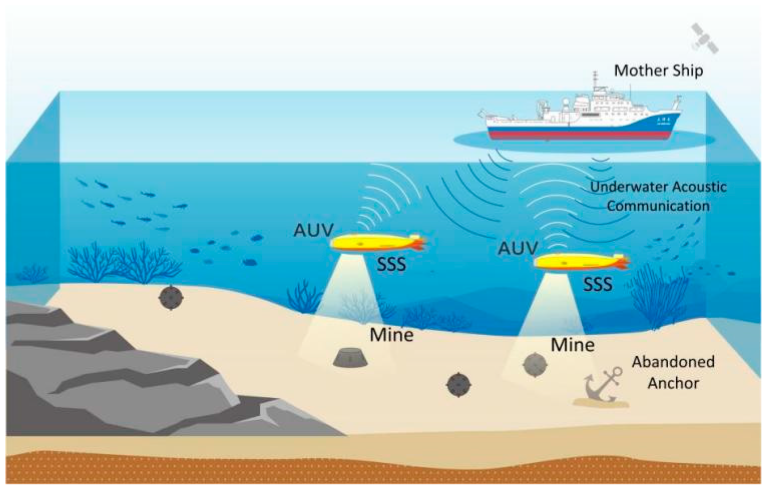
The AUV operates based on pre-programmed missions and onboard decision-making algorithms.Unlike an ROV (Remotely Operated Vehicle), it does not require a continuous cable link to a surface ship
Abstract
test
Autonomy and Control
Onboard Computing/Control System
About
This is the “brain” of the AUV, running the software, control algorithms, and mission logic to execute tasks, navigate, and respond to environmental changes
Abstract
test
Navigation and Positioning
Inertial Navigation System (INS)
About
Calculates the vehicle’s position, acceleration, and velocity by dead reckoning (using internal sensors like accelerometers and gyroscopes) when external references are unavailable
Abstract
test
Navigation and Positioning
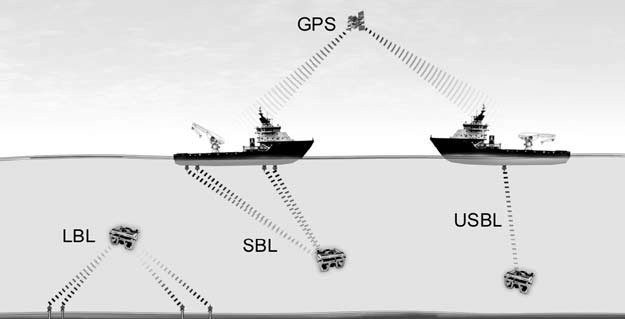
Acoustic Positioning Systems (USBL/LBL)
About
Uses sound waves to determine the AUV’s position relative to a surface vessel or seafloor transponders, which is crucial for reducing the drift errors that accumulate with INS
Abstract
test
Navigation and Positioning
Depth and Heading Sensors
About
Includes pressure sensors for vertical position (depth) and compasses/magnetometers for orientation and direction (heading)
Abstract
test
Navigation and Positioning
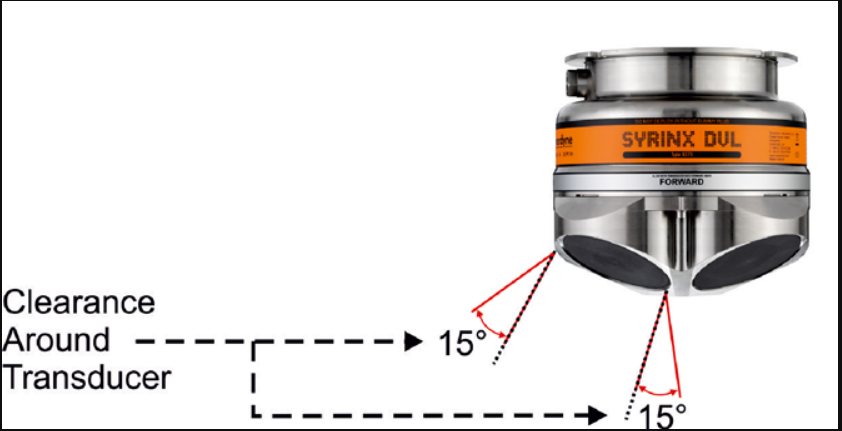
Doppler Velocity Log (DVL)
About
Measures the speed and direction of the AUV over the seabed or water column, which significantly improves the accuracy of the navigation solution
Abstract
test
Navigation and Positioning
GPS (Surface Only)
About
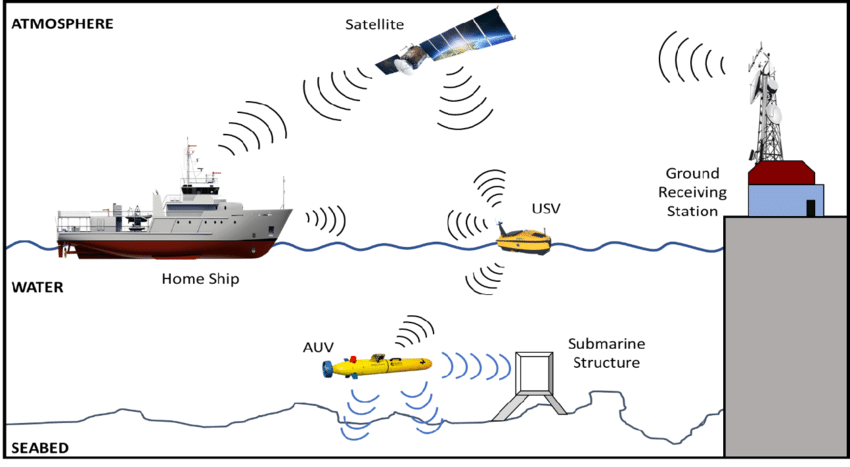
The AUV periodically surfaces to acquire a GPS fix to correct its accumulated navigation error
Abstract
test
Propulsion and Maneuvering
Propulsion System
About
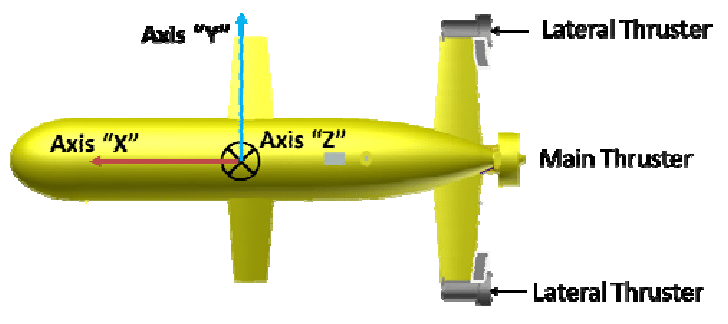
Typically uses electric motors and propellers (thrusters) to generate thrust for forward movement and precise maneuvering
Abstract
test
Propulsion and Maneuvering
Power System
About
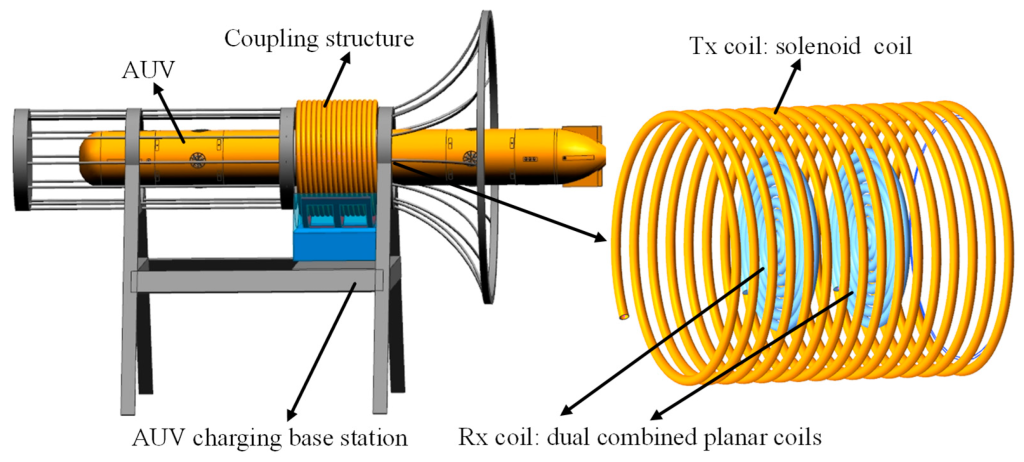
Relies on internal power sources, primarily batteries (like lithium-ion or fuel cells), which dictate the vehicle’s mission endurance (from a few hours to several months for gliders)
Abstract
test
Propulsion and Maneuvering
Buoyancy/Trim Control
About
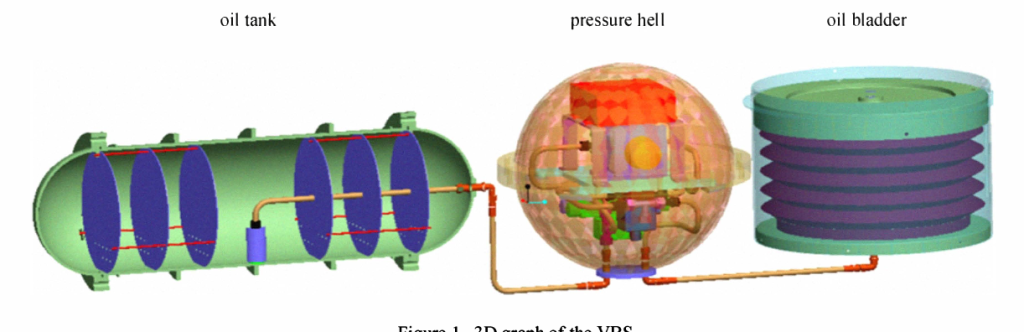
Essential for stability and vertical movement.Specific types of AUVs (gliders) use changes in buoyancy to move vertically and convert that motion into forward glide, allowing for extremely long-duration missions
Abstract
test
Data Collection and Communication
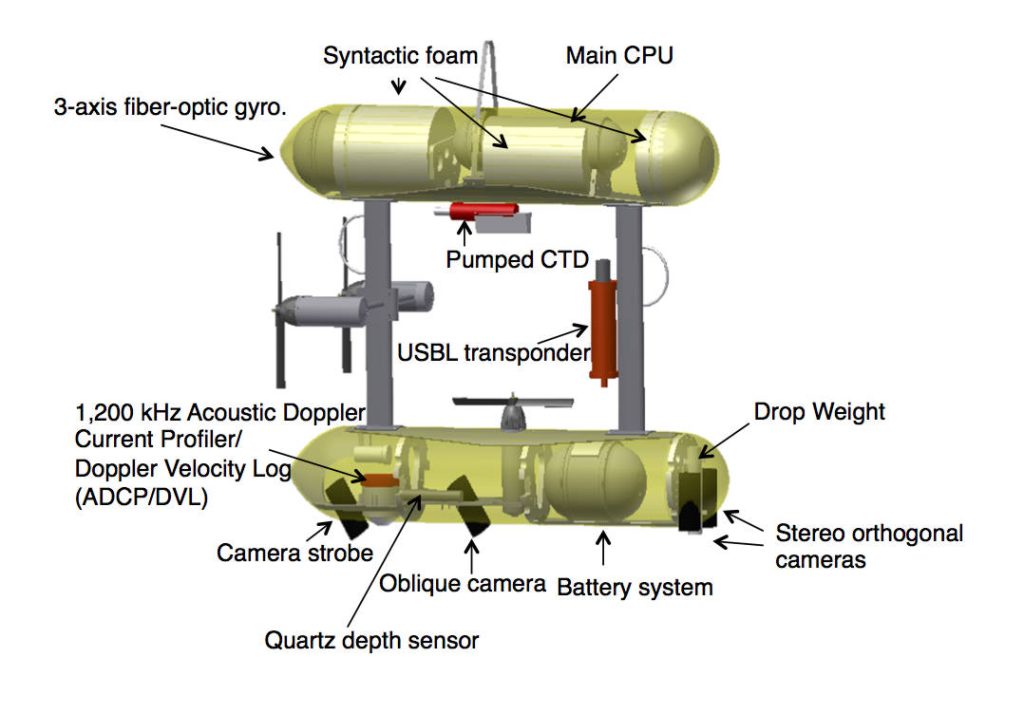
Sensor Payload
About
AUVs carry a variety of advanced sensors for data acquisition
Sonars
(Side-scan, Multibeam, Forward-looking) for seafloor mapping, object detection, and obstacle avoidance
Cameras and Lights
visual inspection and high-resolution imaging
Environmental Sensors
(e.g., CTDs for Conductivity, Temperature, Depth; fluorometers; turbidity sensors) for oceanography and water quality monitoring
Data Collection and Communication
Underwater Communication
About
Uses acoustic modems to send and receive limited data and commands while submerged, as radio waves (like Wi-Fi) don’t travel far in water
Abstract
test
Data Collection and Communication
Surface Communication
About
Uses radio frequency (Wi-Fi, Satellite) for high-bandwidth data offload and mission parameter updates when it surfaces
Abstract
test
Physical Design
Pressure Hull
About
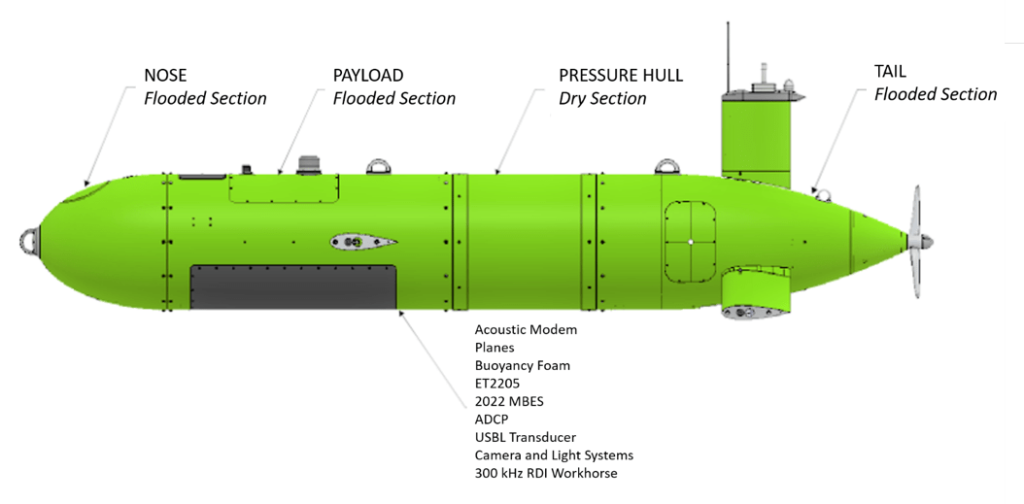
A robust, watertight structure (often torpedo-shaped for hydrodynamics) that protects the delicate electronics and batteries from the immense pressure and corrosion of the deep ocean
Abstract
test
Physical Design
Modular Architecture
About
Many modern AUVs are built with interchangeable modules for different sensors and power sources, allowing for rapid reconfiguration for various missions